





employee
Russian Federation
UDC 631.171
CSCSTI 68.75
Russian Classification of Professions by Education 35.06.01
Russian Library and Bibliographic Classification 40
Russian Trade and Bibliographic Classification 5611
BISAC TEC003000 Agriculture / General
This article examines methods for calculating the key performance indicators of an automated micro-sprinkler irrigation system for seedlings grown using cassette technology in greenhouses. It also demonstrates the importance of preliminary calculations at the design stage to ensure proper equipment selection for product construction. Using a theoretical calculation method, it was determined that the motor power of the sprinkler trolley drive mechanism should be at least 0.5 kW. The motor speed should be within 993 rpm. To ensure uniform movement of the trolleys, the work done by the driving forces must be equal to the work done by the resistance forces. To ensure reliable operation when moving the sprinkler trolleys, a single-stage worm geared motor of the 7MCh-M60 series was selected from a range of available geared motors. The presented calculation data allows us to confidently confirm the reliability of the trolley drive during the design stage of the automated micro-sprinkler irrigation system for cassette seedlings in greenhouses
drive mechanism, calculations, performance calculation, automation
Введение. Среднедушевое потребление овощей в России составляет 104 кг в год, что на 35% меньше, чем рекомендованная Минздравом России норма потребления. Компенсировать недостачу овощной продукции в межсезонный период необходимо за счёт развития собственного производства овощей защищённого грунта. Данный сегмент активно стремится к полному импортозамещению. По итогам 2024 года валовый сбор в зимних теплицах составил 1,63 млн. тонн овощей при внутренней потребности в 2 млн. тонн. Площадь зимних теплиц, находящихся в собственности сельхозорганизаций, КФХ и ИП, выросла до 3350 га, а средняя урожайность достигла 48,7 кг/кв.м.
В целом, по итогам 2024 года, самообеспеченность томатами и огурцами выросла до 79,8% [1].
Прогнозы развития тепличного хозяйства в России следующие:
- К 2026 году ожидается ввод более 3,4 тыс. га новых теплиц, что увеличит производство до 1,7 млн тонн овощей.
- Цифровизация и автоматизация процессов приведут к снижению себестоимости на 15–20% уже к 2030 году.
- Импортозамещение – доля российских томатов на рынке стабильно растёт, а новые гибриды и технологии позволяют снижать зависимость от зарубежных поставщиков.
Тепличные хозяйства наиболее автоматизированы и имеют доступ к современным инновационным технологиям. Уровень импортозамещения во многих сферах тепличного сектора продолжает расти. В последнее время быстрыми темпами развивается сектор тепличного выращивание рассады капусты, салатов и зеленных культур с использованием автоматизированных установок для полива. Механизм их работы мало изучен.
Цель. Обеспечение уверенности соответствия реализации требованиям к значениям показателей надёжности привода установки автоматизированного микродождевания кассетной рассады в теплицах, основанных на вычислениях.
Результаты и их обсуждение. Объектом исследования являются элементы проектируемого привода автоматизированной установки микродождевания теплиц типа проекта «Импотэк» туннельного типа с прямой стенкой габаритами 50х9,6х4,7 м и промежуточными арками через каждые 2 м, высотой нижнего пояса труб арок 2,7 м с диаметром 32 мм. Установка предназначена для дождевания в автоматическом режиме в движении по подвесной рельсовой системе, по которой посредством тросовой системы с мотор-редуктором перемещаются поливная тележка с дождеобразующими устройствами и тележка петлеобразователя питающего шланга [2].
Для определения способности конструкции привода отвечать поставленным требованиям перемещения технологического оборудования дождевальной установки необходимо провести расчёты к требованиям показателей приводного механизма.
Для взаимосвязанного перемещения тележек используется единая тросовая система, кинематическая схема которой показана на рис. 1. Причём поливная тележка движется по отношению к тележке для поворота шланга в два раза быстрее. Это обусловлено тем, что поливная тележка 4 перемещается по всей длине теплицы, а тележка со шлангом 3 только до половины теплицы.
Расчёты определения усилий на перемещение составных частей конструкции, подтверждающие работоспособность и надёжность поливной установки производятся согласно приведённой схеме по аналогу для расчёта крановой тележке и механизма подъёма груза.
Исходными данными для расчёта являются:
1. Масса перемещаемых тележек:
- масса тележки перемещения шланга Р1 – 50 кг,
- масса тележки поливной Р2 – 96,5 кг.
2. Масса шланга полиэтиленового ПЭ 40х3 мм L=50 м с водой – Р3 = 63 кг, в т.ч. шланг – 18 кг, вода – 45 кг.
3. Масса каната (троса) диаметром 4 мм длиной 200 м – Р4 = 13 кг.
4. Диаметр колес тележек D1 – 65 мм.
5. Диаметр ролика поддержки троса и шланга D2 – 20 мм.
6. Диаметр приводного шкива D3 – 200 мм.
7. Передаточное число мотор-редуктора i = 40.
8. Скорость перемещения тележки поливной – 0,26 м/с
9. Сопротивление образованию петли шланга Fпет – 32 кг (экспериментальные данные).
1 - направляющая; 2 - подвес; 3 - тележка перемещения шланга; 4 - тележка поливная; 5 - шланг; 6 - ролик поворотный; 7 - ролик тросовой системы; 8 - трос; 9 - бобышка или упор для рычага отключения движения; 10 - места крепления троса и шланга.
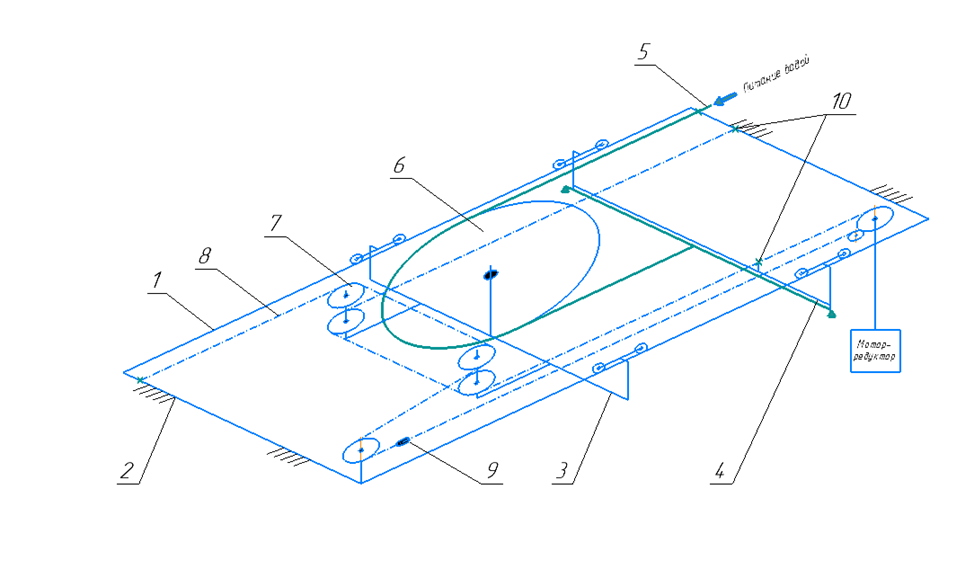
Рисунок 1 – Схема кинематическая функциональная привода системы
Модель расчёта базируется на расчётах механизмов крановых машин [3-6] и включает определение необходимой мощности двигателя мотор-редуктора и частоты его вращения. Для этого в первую очередь необходимо установить сумму всех сопротивлений составляющих механизма привода.
Общее сопротивление (F) передвижению тележек, троса и шланга от статических нагрузок равно сумме сопротивлений
F = Fтп+ Fс
где Fтп – сопротивление тележки поливной; Fс – суммарное сопротивление через полиспаст.
Сопротивление трения при движении тележки по прямому рельсовому пути вычисляется по формуле где kр – коэффициент, учитывающий дополнительное сопротивление от трения реборд колёс и торцов ступиц колеса, принимаем равным 2,5; Р – масса тележки, кг; g – ускорение свободного падения равное 9,81 м/с; f – коэффициент трения подшипника скольжения, принимаем равным 0,3; dв – диаметр вала колеса – 0,02 м; μ – коэффициент трения качения колес по рельсам - 0,0003 м; D1 – диаметр колеса тележки, м.
Сопротивление перемещению тележки шланга Fтш будет равно
Fтш = 2,5 × 50 × 9,81 × (0,3 × 0,002 + 2 × 0,0003) / 0,065 = 124,51 Н
Сопротивление перемещению тележки поливной Fтп равно
Fтп = 2,5 × 96,5 × 9,81 × (0,3 × 0,002 + 2 × 0,0003) / 0,065 = 240,31 Н
Сопротивление перемещению троса Fт находим по формуле
Fт =Р4 × f × g
где Р4 – масса троса – 13 кг; f - коэффициент трения подшипника скольжения (сухое трение) равный 0,3.
Тогда Fт равно
Fт = 13 × 0,3 × 9,81 = 38,26 Н
Сопротивление перемещения шланга с водой Fш находим по формуле
Fш =Р3 × f × g
где Р3 – масса шланга с водой – 63 кг; f – коэффициент трения подшипника скольжения (сухое трение) равный 0,3.
Тогда сопротивление шланга с водой будет равно
Fш = 63 × 0,3 × 9,81 = 185,41 Н
Сопротивление образованию петли (изгиба) шланга Fизг
Fизг = Fпет × g
Fизг = 32 × 9,81 = 313,92 Н
Усилие в канате, набегающим на приводной шкив от сопротивления передвижению тележки поливной равно
Fтп = 240,31 Н
Поскольку в конструкции имеется полиспаст и обводные блоки суммарное усилие от перемещения тележки шланга, троса, шланга с водой и сопротивления образованию петли рассчитывается по формуле где Zп – число полиспастов в системе – 1; Uп – кратность полиспаста – 2; η – кпд общий равен h = hп × hобв, где hп – кпд полиспаста – 0,94; hобв – кпд обводных блоков – 0,74.
h = 0,94 × 0,74 = 0,7
Тогда Fс = (124,51 + 38,26 + 185,41 + 313,92)/(1 × 2 × 0,7) = 472,93 Н
Общее сопротивление равно F = 240,31 + 472,93 = 713,24 H
Статическая мощность двигателя привода равна кВт где η – кпд редуктора - 0,74. Pc = (713,24 × 0,26) / (1000× 0,74) = 0,25 кВт
Так как в момент пуска двигателя потребляемая мощность из-за нагрузки страгивания тележек возрастает в двое, то необходимо предусмотреть двигатель для комплекта мощностью не менее 0,5 кВт.
Определяем число оборотов двигателя при перемещении тележек с максимальной заданной скоростью
п V L = i 60 , об/мин
где Vпер – 0,26 м/с; Lшк – длина окружности шкива равна
Lшк = Dшк × π = 0,2 × 3,14 = 0,628 м
При передаточном числе редуктора i = 40 необходимое число оборотов двигателя будет равно
nдв = (0,26 × 60) / 0,628 × 40= 993 об/мин.
Выводы и рекомендации.
1. Расчётным методом было определено, что мощность двигателя привода механизма передвижения тележек дождевальной установки должна быть равна ≥ 0,5 кВт.
2. Число оборотов двигателя должно быть в пределах 993 об/мин.
3. Для равномерного движения тележек установки необходимо, чтобы работа движущих сил была равна работе сил сопротивления.
4. Для надёжного выполнения работы по перемещению исполнительных тележек дождевальной установки из ряда предлагаемых мотор-редукторов был отобран одноступенчатый червячный мотор-редуктор серии 7МЧ-М60.
5. Расчётные данные позволяют обеспечить уверенность надёжности работы привода тележек на стадии проектирования конструкции установки автоматизированного микродождевания кассетной рассады в теплицах.
6. Автоматизированное устройство микродождевания в теплице позволяет повысить процесс механизации выращивания рассады, сократить до минимума использование ручного труда и привести к снижению себестоимости продукции.
1. Novye vozmozhnosti dlya teplichnoy otrasli. / Sel'skohozyaystvennye vesti. №2. 2025. S. 50-52.
2. Grushin A.V., Gzhibovskiy S.A., Kolomeec A.V. Aktual'nost' razvitiya teplichnogo kompleksa. / Vestnik meliorativnoy nauki. 2024. № 1.– S. 62-66.
3. Kuz'min A.V., Maron F.L. Spravochnik po raschetam mehanizmov pod'emno-transportnyh mashin. – 2-e izd., pererab. i dop. – Mn.: Vyssh. shk., 1983. – 350 s.
4. Kursovoe proektirovanie gruzopod'emnyh mashin: Ucheb. Posobie dlya studentov mashi-nostr. spec. vuzov/S.A. Kazak, V.E. Dus'e, E.S. Kuznecov i dr.; Pod red. S.A. Kazaka. – M.: Vyssh. shk., 1989. – 319 s.
5. Raschety mehanicheskih peredach : uchebnoe posobie k kursovomu i diplomnomu proekti-rovaniyu / S.G. Karnauh – Kramatorsk : DGMA, 2016. – 253 s.
6. Raschet kranovyh mehanizmov. Kursovoy proekt [Elektronnyy resurs]: uchebnoe posobie /V.V. Karzhavin, S.F. Kamenskih, I.V. Dushanin. Ekaterinburg: Izd-vo Ros. gos. prof.-ped. un-ta, 2017. 115 s. Rezhim dostupa: http://elar.rsvpu.ru/978-5-8050-0634-1.